産官学連携自動走行実証実験促進事業(あま市モデル)
産官学連携自動走行実証実験促進事業(あま市モデル)に関する協定を締結しました
平成28年5月31日(火曜日)、市は、名古屋大学、アイサンテクノロジー株式会社、東京海上日動火災保険株式会社と自動車自動走行の技術開発に関する協定を締結しました。

この協定は、自動走行の技術開発に関して、4者が相互に連携することにより、それぞれが有する人的・物的資源を有効に活用し、地域社会に貢献することを目的とするものです。
今後、この協定を基に七宝焼アートヴィレッジにおいて、休館日の駐車場などを自動走行のテストコースとして、名古屋大学・アイサンテクノロジー株式会社に有償で貸し出します。また、その収入を原資に、安全管理に関し東京海上日動火災保険株式会社の協力も得ながら、体験試乗会などのイベントを開催していく予定です。

なお、テスト走行を行う場合(休館日)は、七宝焼アートヴィレッジ敷地内への立入りを制限することがありますので、ご理解ご協力をお願いします。
自動走行とは・・・

ハンドルやブレーキなど、人の操作なしで自動で走行できる自動車の技術です。
高齢化社会に対応する新たなサービスの創出や、交通事故を始めとする様々な交通課題の解決に寄与していくことが期待されています。
名古屋大学の取り組み ~高齢化社会を支える研究~
「高齢者が元気になるモビリティ社会」を実現するために
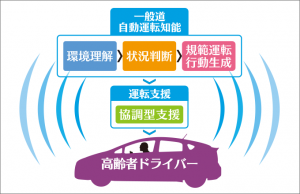
名古屋大学未来社会創造機構 知能化モビリティグループでは、高齢者が自らの意思でいつでも・どこでも移動できる社会の実現に向け取り組んでいます。高齢ドライバーにとって難しい、出会い頭、右左折等における事故を防ぐための受容性の高い運転支援を目指して、「先読み運転」を実現できる運転知能の研究開発を行っています。
「周囲の環境を理解」し、「その状況を判断」し、「どのように運転を行うべきか答えを導く」方法を、そしてそれを「どのようにドライバーの支援に役立てるか」、多くの課題に取り組みます。

環境理解>>>>>>
一般道自動運転知能の研究として、「環境理解」での課題は、交通事故のリスク予測のために高精度な物標の検出や物標属性の認識が必要となること。そのアプローチとして、物標の見えの個体差や、隠れに対する最先端機械学習に基づく歩行者検出法の提案や、多種の物標属性(向き、大人/子供、スマホ歩きなど)認識のために距離を同時取得できるセンサを活用しました。成果として、Deep Learning(※1)を用いた歩行者検出法を開発、世界トップレベルの検出性能を達成しています。
(※1)自分の車の周りの道路、障害物、他車両、信号などの状況を認識すること
状況判断>>>>>>
「状況判断」において、リスク予測のために、見通し外の物体動き予測も必要となることが課題でした。対策として、高精度地図と車載外界センサで交差経路の見通し状態を把握することや、運転指導員の運転行動を解析、判断ロジックをモデル化しています。その結果、高精度地図の作成とそれを利用する基盤技術、パーティクルフィルタに基づく見通しの悪い交差点での危険予測法を開発しました。
規範運転行動生成>>>>>>
「規範運転行動生成」では、運転支援に規範となる運転行動の生成が必要となるため、運転指導員による先読み運転事例を規範運転行動としてデータベース化しました。また、リスクポテンシャルモデルにより、DB解析(※2)を行い、規範運転行動を生成。これらの取り組みにより、運転指導員の行う運転と同様の運転行動を生成するシステムを実現しています。
(※2)(環境理解・状況判断した周辺状況に対して)ベテランドライバのような規範運転と言える運転操作を生成すること

協調型支援>>>>>>
「協調型支援」における課題は、安全確保と高齢者受容性を両立した違和感のない支援の実現であるため、個々の高齢者の運転行動を予測するための運転行動モデルを利用。必要時のみ違和感なく操作介入する安全制約範囲を規範運転行動に設定しました。操作介入判断アルゴリズムを開発し、ドライビングシミュレータ上に実装。介入制御をフィードバックできるドライビングシミュレータ用高性能ステアリング装置の開発を行いました。
アイサンテクノロジー株式会社の取り組み ~自動走行を支える技術開発~
自動走行に重要なキーテクノロジー 「高精度三次元地図データベース」を実現

現在日本では、2020年に向けて、オリンピックエリア、高速道路や市街地等の高精度な三次元データ整備を進めています。自動走行の実現には、様々な技術やインフラの整備が必要であり、キーテクノロジーによる地図についても検討されています。
アイサンテクノロジー株式会社は、日々これらの技術開発に取り組んでいます。

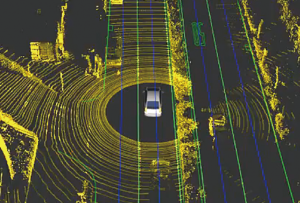
MMS(モービルマッピングシステム計測)>>>>>>
自動走行支援システムには、道路を丸ごとスキャンした高精度な三次元地図が必要です。そこで、専用車両(三菱モービルマッピングシステム)を用いて道路の点群データ(x,y,z)を取得します。路面をはじめ、電柱・電線・ガードレール・縁石・白線等の道路に留まる制定黄な情報をすべて三次元で再現していきます。
位置精度は10cm以内、図形精度は5mm~3cmで高精度データを実現します。取得したデータをもとに、自動走行支援システムに必要な情報となる路面ペイントや白線、縁石、カーブ、勾配、信号、標識等をデータベース化します。
アイサンテクノロジー株式会社では、MMSを用いた先進運転支援システム(ADAS)、自動走行システム向け高精度三次元地図データベース「ADASmap(※」1)を考案し、自動車関連企業・大学等へ提供しています。
(※1)「ADASmap」はアイサンテクノロジー株式会社の登録商標
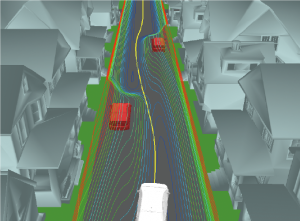
■高精度地図データベースの特徴とその活用
高精度で汎用性の高いことが特徴の地図データベースは、自動走行実用化に不可欠な「ダイナミックマップ(※2)」の生成に役立てられます。
(※2)静的な地図の上に動的情報(規制情報、人、車、天候等々)を重ねて表示したもの

このページに関するお問い合わせ
市長公室 人事秘書課
あま市七宝町沖之島深坪1番地
電話:052-444-1713 ファクス:052-444-1351
Eメールでのお問い合わせは専用フォームをご利用ください。